Santé - Médecine personnalisée
Anévrisme cérébral : la réalité augmentée guide le chirurgien
Date:
Date:
Mis à jour le 08/04/2021
Comment aider les neurochirurgiens à intervenir dans de meilleures conditions ? Erwan Kerrien, chercheur dans l’équipe Magrit, travaille sur le sujet depuis le début de sa carrière. Il entretient des liens suivis avec l’équipe chirurgicale du CHRU Nancy, l’une des meilleures au monde en matière d’anévrismes. Et au fil des ans, il a assisté à plusieurs opérations pour mieux identifier les difficultés rencontrées.
« C’est là qu’on mesure combien ces interventions sont délicates, raconte l’intéressé. Le chirurgien ne travaille pas sur un organe qu’il peut palper et voir sous différents angles : il glisse un cathéter dans l’artère fémorale au niveau de l’aine, puis le fait remonter au cerveau via le système sanguin. Arrivé face à l’anévrisme, qui ne fait pas plus de 5 mm de diamètre, il y libère de minuscules spires en platine qui rigidifient les parois distendues et entravent la circulation du sang, jusqu’à former un caillot qui fait office de bouchon. Le tout en manipulant l’autre extrémité du cathéter, qui mesure 1m50 environ. »
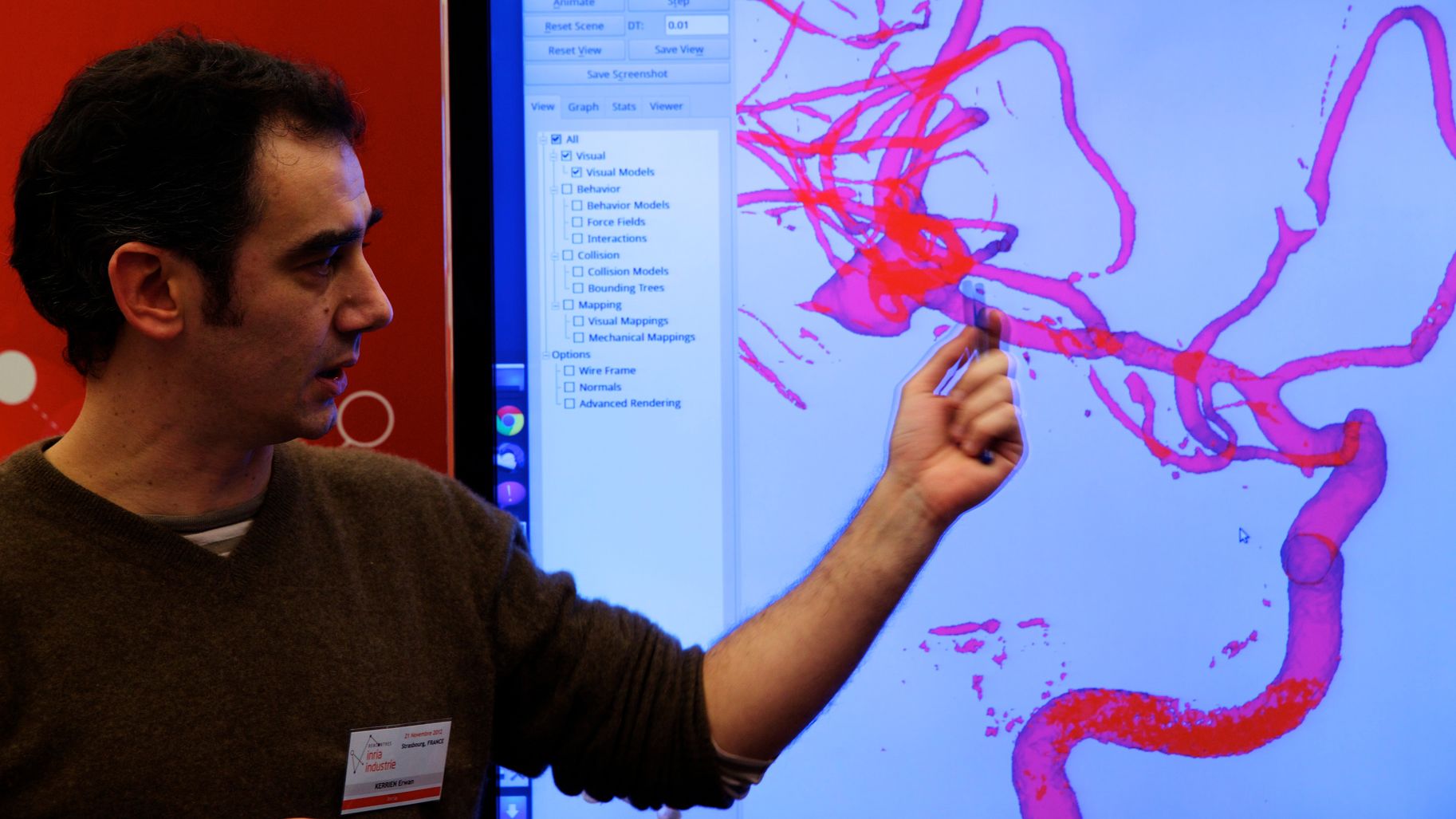
Pour guider ses gestes, le chirurgien ne dispose que d’images 2D en noir et blanc du système sanguin, affichées sur des écrans de contrôle. « Elles écrasent toute perspective et obligent à se représenter la scène en 3D pour soi-même, avec le risque d’erreur d’interprétation. C’est une charge mentale considérable. » La solution proposée par l’équipe Magrit ? « Augmenter » ces images 2D, c’est-à-dire les enrichir d’images 3D qui apportent des informations supplémentaires.
Le point de départ des recherches d’Erwan Kerrien est l’apparition d’une nouvelle technique radiologique, l’angiographie rotationnelle. L’acquisition très rapide de vues sous différents angles permet, grâce à des algorithmes de reconstruction d’image, de révéler en 3D l’arbre vasculaire intracérébral et plus précisément les caractéristiques de l’anévrisme : son emplacement exact sur l’artère, sa taille, sa forme, en particulier s’il est constitué de plusieurs lobes.
Mais cette image 3D, pour être vraiment utile, doit pouvoir être superposée à celles en 2D des écrans de contrôle. « Ce fut un développement très exigeant. Pour que le chirurgien ait l’impression d’observer une image unique, il fallait recaler avec une grande précision cette image 3D selon l’angle de vue, l’assortir d’ombres pour simuler les reliefs, éviter de masquer des détails importants de la scène réelle… » En 2007, cette technologie a été transférée à GE Healthcare, l’un des leaders mondiaux de l’imagerie médicale, qui la commercialise depuis dans de nombreux pays.
Erwan Kerrien s’est lancé ensuite dans un autre défi : la « reconstruction d’outil », c’est-à-dire l’ajout d’une seconde image 3D sur les écrans de contrôle, celle du cathéter. Ainsi, le chirurgien voit simultanément l’artère, l’anévrisme et son outil, et peut rétablir la correspondance entre l’œil et la main.
Mais comment créer par ordinateur une image 3D en temps réel représentative d’un tuyau souple d’1m50 qui se déplace dans les artères, tourne sur lui-même, forme parfois une boucle ? « Au départ, les temps de simulation étaient beaucoup trop longs », reconnaît Erwan Kerrien.
Puis l’équipe a réalisé que le comportement du cathéter était largement prévisible, parce qu’il chemine dans le système sanguin (qui peut être cartographié en 3D), qu’il plie et décrit des courbes mais ne casse pas et ne connaît pas l’angle droit. « Nos collègues de l’équipe Mimesis, commune avec l’université de Strasbourg et spécialisée dans la simulation mécanique temps réel dans les vaisseaux sanguins, nous ont aidés à développer des algorithmes temps réel fiables. »
Depuis, l’équipe Magrit réalise des étapes de validation. Elle a notamment mené des tests probants avec une maquette grandeur nature d’un vaisseau sanguin visible par transparence. « Les images du cathéter reconstruites à partir de deux caméras synchronisées doivent concorder avec sa simulation calculée par ordinateur. »
Reste à traiter les cas les plus difficiles, par exemple quand l’extrémité du cathéter se présente face au chirurgien : comment savoir si elle se déplace ou si elle tourne sur elle-même ? Les recherches les plus récentes d’Erwan Kerrien portent donc sur des algorithmes de fusion d’informations qui visent à assurer que le cathéter simulé se superpose exactement et en permanence au cathéter vu dans l’image peropératoire. « Nous devons être fiables à 100 % pour que les industriels de la santé et le corps médical adoptent cette technologie. La reconstruction d’outil fera gagner du temps au chirurgien et facilitera sa formation sur ordinateur. »
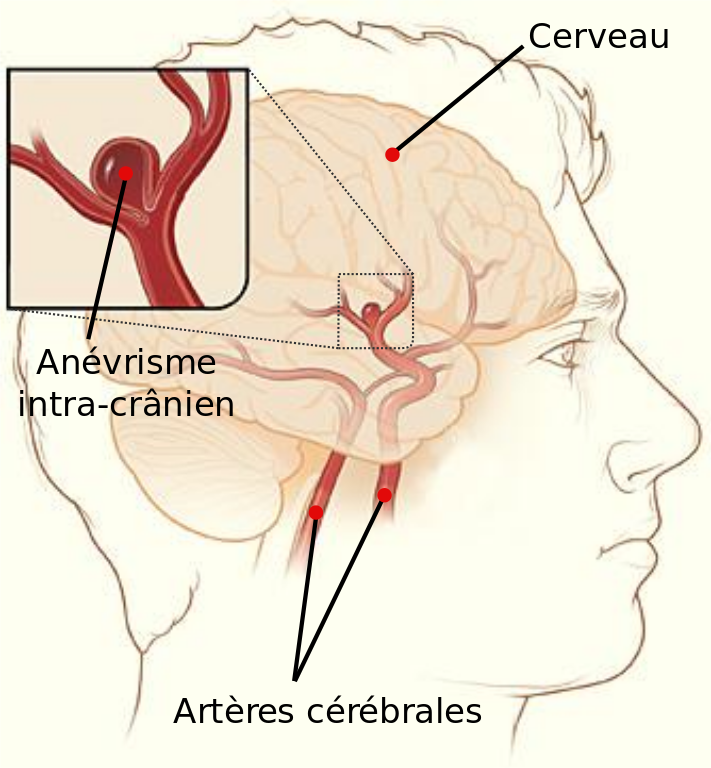
Un anévrisme est une hernie qui se forme sur la paroi d’une artère ou d’un vaisseau. Ce point de faiblesse peut se rompre, ce qui déclenche une hémorragie parfois massive. Les deux organes les plus souvent touchés sont l’aorte et le cerveau. On dénombre chaque année 5 000 cas de rupture d’anévrisme en France. Seuls 50 % des patients sont encore en vie à leur arrivée à l’hôpital.