Santé / Médecine personnalisée
Hybrider la simulation numérique et l’intelligence artificielle
Date:
Date:
Mis à jour le 15/12/2022
Optimiser la production d’énergie d’une éolienne, limiter la consommation en gaz d’une turbine, évaluer la capacité de résistance au vent d’un ouvrage d’art, consolider des prévisions météorologiques ou climatiques, modéliser la propagation d’ondes gravitationnelles : la simulation numérique est devenue un outil standard utile à de nombreux domaines des sciences et de l’industrie. De nouveaux usages émergent, en particulier en médecine et en chirurgie, où la simulation permet par exemple aux praticiens de comprendre et prédire l’impact d’un acte chirurgical à partir de modèles mathématiques, en reproduisant avec précision les effets de l’intervention.
Dans ce domaine, Robin Enjalbert et Alban Odot, respectivement ingénieur et doctorant en troisième année au sein de l’équipe Mimesis du centre Inria Nancy – Grand Est, travaillent sur une approche innovante : faire dialoguer les techniques de calcul numérique avec les algorithmes d’intelligence artificielle (IA) – notamment les réseaux de neurones – afin d’améliorer les performances des simulations. Quelles sont les applications de leurs travaux ? Il s’agit de rendre possibles des simulations "en temps réel", par exemple en développant des outils assistant les chirurgiens dans la préparation ou la conduite des opérations au bloc.
Diplômé de Télécom Physique Strasbourg, école d’ingénieurs généraliste, Robin Enjalbert a également suivi une formation en sciences et technologies pour la santé (robotique chirurgicale, imagerie médicale, biomécanique, etc.) et s’est intéressé très tôt aux applications de techniques numériques avancées. « J’ai découvert certaines méthodes d’intelligence artificielle à l’occasion de mon stage de deuxième année. J’ai approfondi le sujet, en lien avec les applications en santé, à l’occasion de mon stage de fin d’études chez Inria sous la direction de Stéphane Cotin, responsable de Mimesis. Un double cursus est un véritable atout pour développer des innovations en santé numérique… »
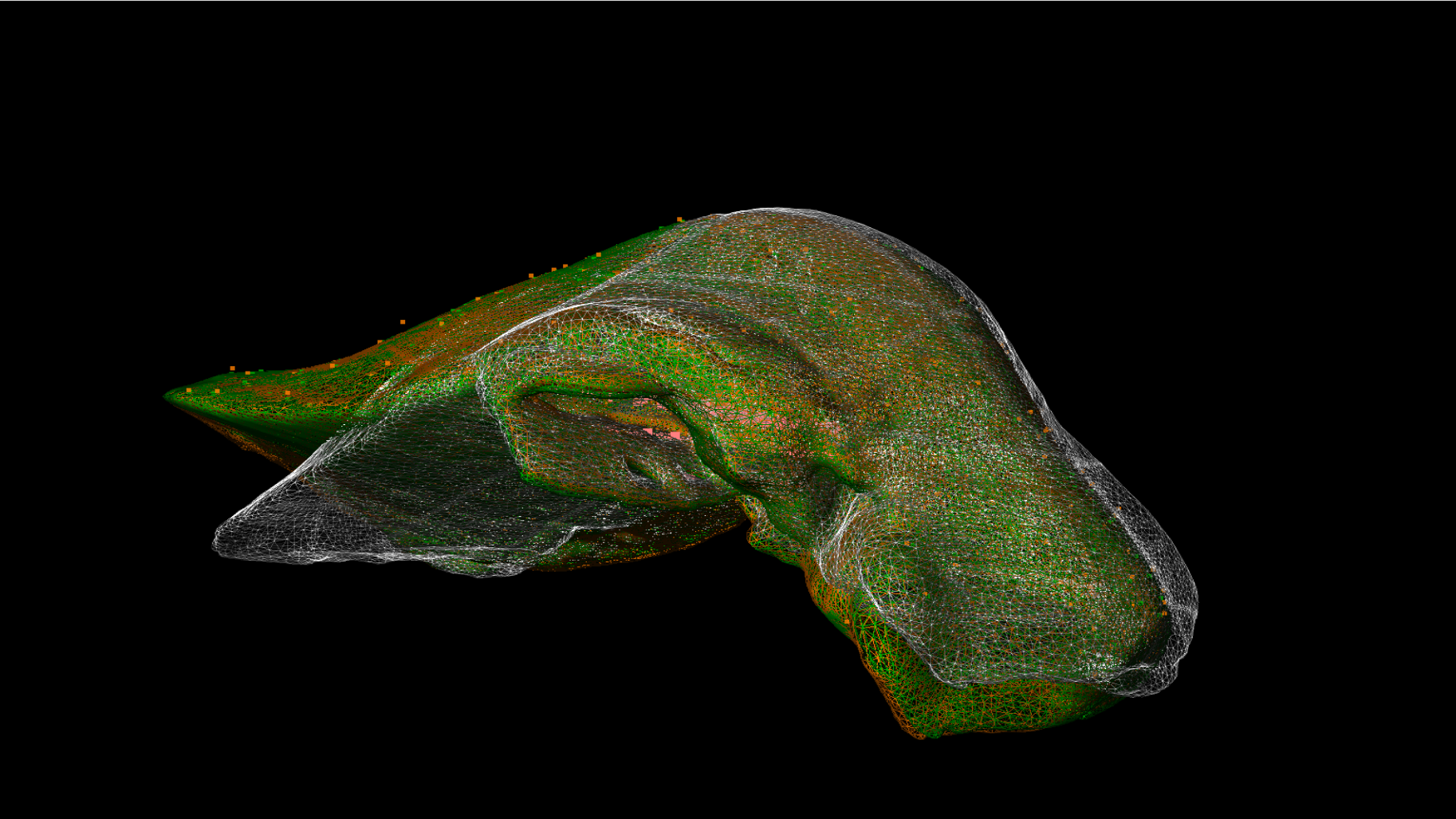
L’équipe Mimesis s’intéresse notamment à l’utilisation de l’IA et de la simulation pour assister certains gestes chirurgicaux, comme l’insertion de cathéters. Les assistants numériques se fondent en particulier sur des simulations avancées. « Il s’agit de développer des modèles mécaniques d’organes humains. Nous utilisons pour cela des outils de calcul scientifique à même de rendre compte du comportement, très complexe, du vivant, détaille Alban Odot. Par exemple, les tissus de l’organisme ont la capacité de se déformer de façon importante : ils ont un comportement "hyper élastique" que des outils de calcul sont capables de modéliser. »
C’est par exemple le cas de SOFA, plate-forme logicielle open source développée depuis plus de dix ans par Inria pour la simulation "multiphysique" (impliquant différentes composantes physiques – mécanique des fluides ou des structures par exemple). SOFA intègre aujourd’hui un grand nombre de modèles, de solveurs et d’algorithmes autorisant ainsi le développement rapide de nouvelles simulations, dont celles qui intéressent le médical et la santé.
Les simulations s’avèrent cependant très coûteuses en temps de calcul. Par exemple, afin de prédire avec justesse les déformations de l’œil, du cœur ou de vaisseaux sanguins, les algorithmes ont besoin de plusieurs "itérations" de calcul : le premier stade permet d’estimer une valeur de cette déformation à une précision grossière (de l’ordre de 10 %), les suivants d’affiner le calcul pour atteindre les précisions demandées (entre 1 % et 0,1 %, voire moins, selon les cas).
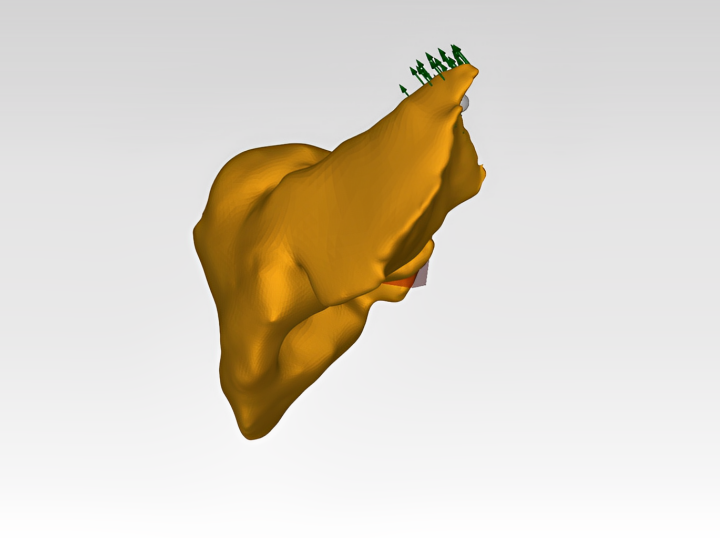
Ce processus itératif est long – une dizaine de secondes, à réaliser à chaque étape de calcul : une durée trop importante pour les applications en santé, où il est nécessaire de prédire des déformations complexes d’organes en temps réel. L’objectif : ajuster les outils de réalité augmentée pouvant être utilisés directement par les chirurgiens lors d’interventions, ou pour l’apprentissage de certaines manipulations, telles que la navigation en chirurgie endovasculaire.
Comment accélérer le processus ? L’équipe Mimesis utilise alors des techniques d’IA, comme le précise Alban Odot : « Le principe de nos recherches consiste à "faire apprendre" la physique d’un objet à un réseau de neurones en lui fournissant, pour son entraînement, un grand nombre d’échantillons de déformations de cet objet – les données nécessaires à l’apprentissage étant produites avec des simulations numériques SOFA. Une fois entraîné, le réseau est ensuite capable de prédire, dans la simulation, les déformations de cet objet à partir d’une sollicitation appliquée avec une très bonne résolution et un temps de calcul minime. » Un procédé très performant : « Quelques millisecondes s’avèrent nécessaires avec cette technique de prédiction – nettement plus efficace que la technique d’itérations ! », souligne le chercheur.
Toutefois, simulation numérique et intelligence artificielle utilisent des méthodes différentes. L’un des enjeux majeurs de ces travaux est donc d’orchestrer un dialogue efficace entre les outils numériques. « Je travaille depuis plus d’un an à mettre au point DeepPhysX, un environnement de développement permettant d’interfacer les algorithmes d’apprentissage et les simulations numériques, explique Robin Enjalbert. Codé en langage Python, DeepPhysX permet d’utiliser des données synthétiques issues de simulations numériques pour, d’une part, entraîner des réseaux de neurones, et, d’autre part, utiliser les réseaux ainsi entraînés comme composants de ces simulations numériques. »
Articulé en différents éléments assurant la gestion des flux de données entre les parties "simulation" et "apprentissage", et d’autres fonctions d’interface entre ces deux éléments, DeepPhysX est conçu pour être compatible avec tout type d’outils (par exemple ceux utilisant un code de calcul commercial pour les simulations, comme dans l’industrie). De nombreux environnements et applications de développement sont donc potentiellement accessibles à DeepPhysX. Il est d’ailleurs déjà utilisé par plusieurs doctorants de l’équipe Mimesis pour différents aspects : création de données d’apprentissage, entraînement de réseaux de neurones, application des prédictions des réseaux entraînés sur leur simulation.
Pour l’heure, l’outil s’appuie sur une seule méthode d’IA (l’apprentissage supervisé de réseaux ayant un tenseur d’entrée et un tenseur de sortie), mais l’objectif de Robin Enjalbert est d’étendre les possibilités de DeepPhysX : « Les futurs développements ont pour objectif d’amener plus de flexibilité dans le transfert de données, ce qui ouvre la porte à d’autres techniques d’IA, comme l’apprentissage par renforcement ou les réseaux de neurones de graphe », explique l’ingénieur.
Dans le champ de la santé numérique, de premières applications d’outils commencent à voir le jour, par exemple en chirurgie oculaire, un domaine dans lequel se développe InSimo, une startup issue de la recherche Inria. Cette thématique est en plein essor et Robin Enjalbert et Alban Odot, formés à des techniques avancées, auront sans doute à l’avenir d’autres innovations à proposer au monde académique ou industriel. Leur aventure ne fait que commencer…