Réduire la pénibilité au travail : la cobotique Inria séduit les entreprises
Date:
Date:
Mis à jour le 23/11/2023
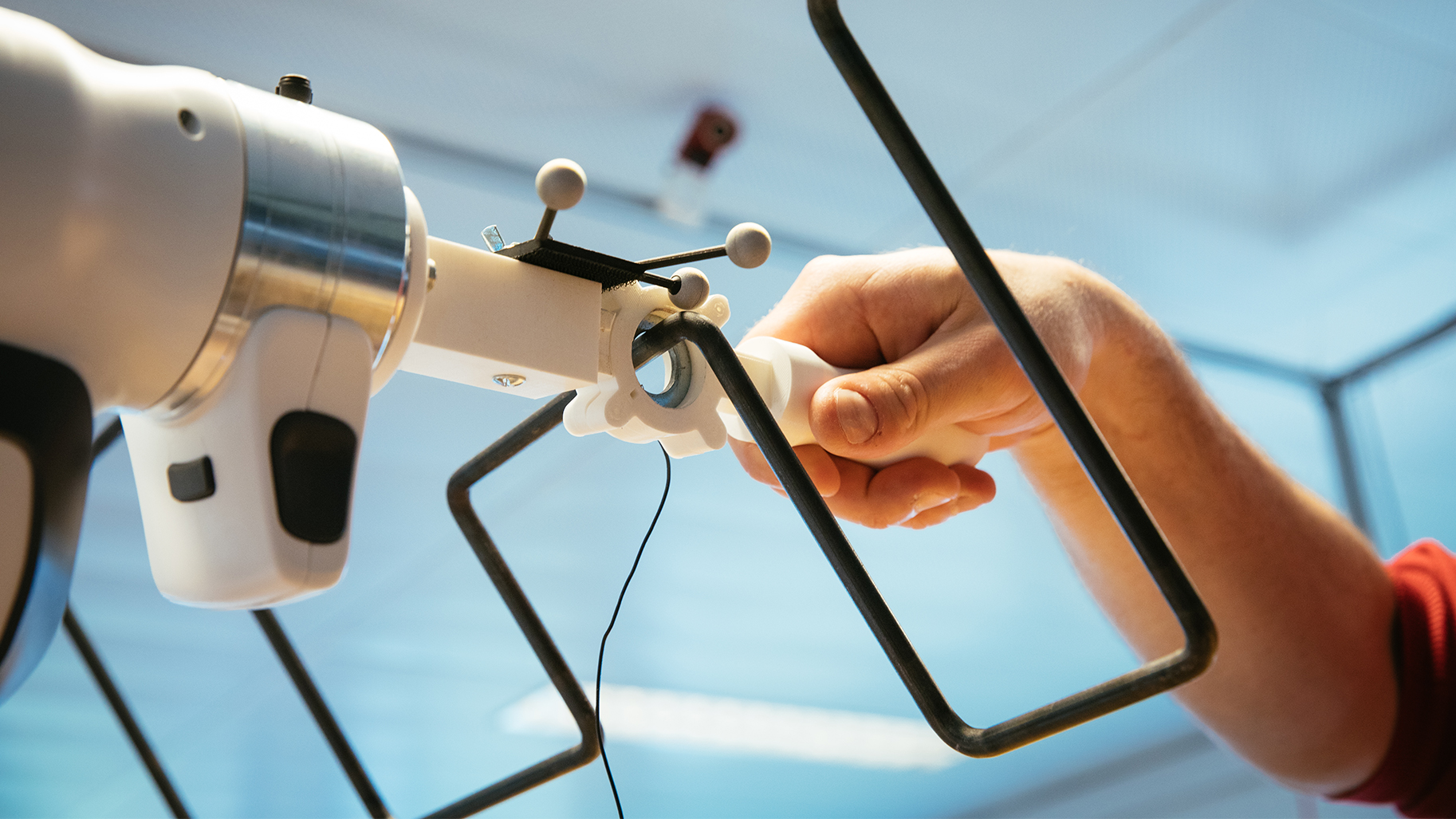
Soulever de lourdes plaques d’égout, nettoyer des résidus collants sur les parois de grandes cuves, réaliser les finitions d’une pièce en bois sur une machine-outil qui tourne à 8000 tours/minute : les projets cobotiques de l’équipe Auctus plongent au cœur des postes de travail et du quotidien des entreprises.
Des cobots fabriqués en série répondent déjà aux cas les plus simples, précise Jean-Marc Salotti, professeur à l’École nationale supérieure de cognitique et membre permanent de l’équipe. Pour notre part, nous étudions des tâches trop complexes pour être confiées à un robot, mais assez pénibles ou risquées pour justifier une assistance intelligente à l’opérateur.
Pourquoi « intelligente » ? Parce que le cobot interagit avec l’Homme et peut le côtoyer de très près. Pour des raisons de sécurité, il doit être capable de ralentir ses mouvements ou d’appliquer moins de force. Il peut aussi doser son intervention en fonction de la sûreté de geste ou de la fatigue de l’opérateur, ce qui implique qu’il les perçoive.
Ces questions font appel à de l’informatique, de l’automatique, de la cognitique, des sciences humaines, etc. Auctus, qui compte treize personnes dont quatre enseignants-chercheurs, réunit ces compétences.
Aucun projet ne ressemble à un autre, puisqu’il s’agit de situations spécifiques. En revanche, les thèmes abordés par l’équipe restent les mêmes. D’abord, est-il possible de développer un cobot pour le poste de travail ciblé ? « Pas toujours évident, par exemple quand on nous demande d’aider un opérateur à réaliser un nœud complexe pour serrer des câbles. » Ensuite, quel sera le partage des tâches et des décisions entre l’Homme et le cobot ? Jusqu’à quel point faut-il automatiser ?

Autre interrogation : quels capteurs et quels signaux indiqueront au cobot ce qu’il doit faire ? Il est facile de mesurer une pression ou une température. Mais déjà plus délicat de déterminer si le cobot heurte un obstacle (il doit s’arrêter ou reculer) où s’il racle un fond de cuve (il doit continuer à la nettoyer !). Quant à l’activité humaine, elle est très difficile à interpréter.
Jessica Colombel, doctorante à Auctus, cherche à analyser la signature corporelle d’une personne qui marche, pour distinguer si elle est joyeuse, triste, en colère ou sans émotion particulière.
Des méthodes existent, mais elles n’ont pas été conçues pour améliorer une interaction cobot – opérateur : elles manquent de précision et doivent être affinées.
L’enjeu à terme ? Détecter la fatigue ou la baisse de vigilance d’un opérateur, pour ajuster la réponse du cobot. Ou dans un autre contexte, déterminer si une personne âgée doit être assistée quand elle risque la chute, par exemple lors d’un demi-tour sur elle-même.
Au début d’un projet, les chercheurs d’Auctus rencontrent les opérateurs directement concernés.
Ils sont les mieux placés pour nous expliquer leurs gestes, leurs difficultés et leurs attentes, détaille Jean-Marc Salotti. Dans certains métiers, ils tiennent à conserver certaines tâches pénibles car ils les jugent valorisantes. Or, nous ne voulons pas réduire la pénibilité à tout prix en escamotant ces aspects psychologiques. Il y a là un double enjeu d’acceptabilité et d’éthique.

Jessica Colombel est sur la même longueur d’onde : « un cobot doit proposer son assistance, jamais l’imposer. C’est pourquoi nous voulons analyser finement le comportement humain. »
Ce comportement peut réserver des surprises. Ainsi, Jean-Marc Salotti étudie les réactions de l’opérateur quand le cobot s’arrête de manière impromptue. Des expériences avec des groupes-tests lui ont montré que 90% des sujets n’hésitent pas à s’en approcher, alors qu’ils ont reçu la consigne formelle de rester à distance ! « Ils sont focalisés sur l’objectif de rendement que nous leur donnons et privilégient l’efficacité à la sécurité. De plus, ils estiment qu’un objet qui ne bouge pas est forcément à l’arrêt, donc inoffensif. »
Ces réactions humaines se répètent si le système s’interrompt au milieu d’une trajectoire dans une posture insolite. Pour inciter les utilisateurs à la prudence, il faudra peut-être associer aux arrêts inopinés des mouvements erratiques de type vibration ou tremblement… La richesse et la subtilité des interactions opérateur - cobot n’ont pas fini de nourrir les travaux d’Auctus.

Rendre plus sûre la « toupie », cette machine-outil utilisée par les menuisiers : c’est l’objectif poursuivi par Auctus, la dernière équipe-projet du centre Inria Bordeaux – Sud-Ouest à avoir été créée, qui a monté un partenariat avec un centre de formation d’apprentis.

L'équipe-projet Auctus, commune à Inria et l'université de Bordeaux, est rattachée à l'IMS, le laboratoire de l'Intégration du Matériau au Système. Son objectif est de concevoir des systèmes d’assistance robotisés à destination du secteur industriel, s'inscrivant dans la thématique de la cobotique (robotique collaborative).