Project-team
AUCTUS
Robots for Humans at work
Robots for Humans at work
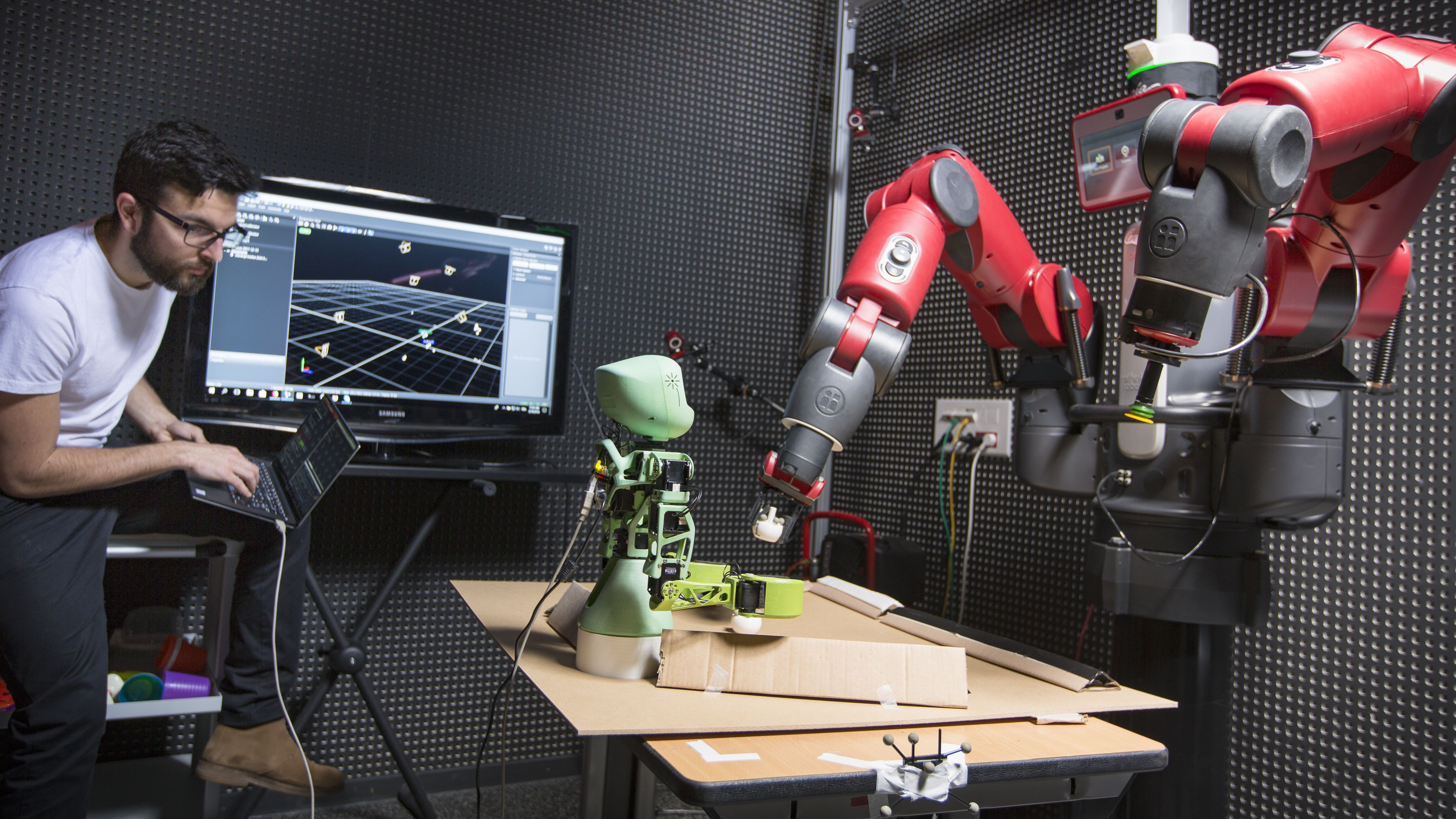
The objective of the Auctus team is to imagine the collaborative robots of the future.
The ability to adapt is a characteristic of the human being, which places him at the center of the production apparatus. However, this can no longer be done at the expense of his health and well-being. How can the improvement of a person's manual and analytical skills be reconciled with the desired increase in productivity and manufacturing quality, while reducing the drudgery of work? Collaborative robotics, which we seek to build, is one of the solutions to meet this societal challenge. It is part of the integration of digital technologies in the production process to meet the challenge of customizing services and products, as well as promoting human agility to make manufacturing and maintenance lines flexible and versatile.
The first challenge is to assess the difficulty of a task, the safety and well-being of operators and, further upstream, their cognitive state, which influences their sensorimotor strategies to perform the task. The digitization of plants, through the installation of sensors on site, allows better observation of machines and people. The available information can thus help to rethink the way in which the evaluation of activities is carried out. In this way, we aim to establish a direct link between the motor aspects of movement and the cognitive aspects that dictate motor strategies: fatigue, experience in the construction of know-how (manual/cognitive), etc. How to determine the right criteria to adapt a cobot's behavior remains largely unexplored in robotics.
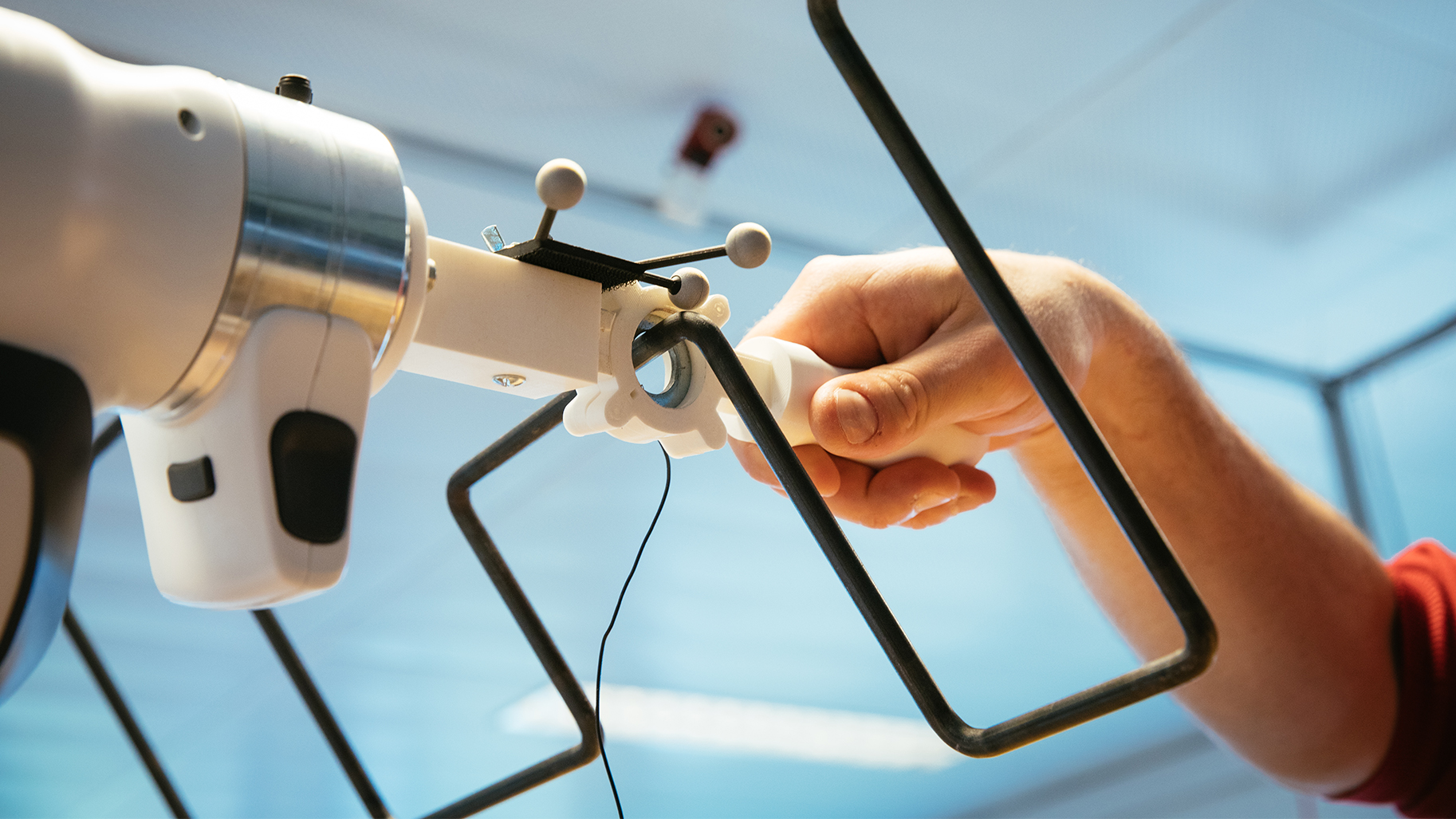
The second challenge is to define a methodology to link the analysis of the task and the human movements it induces to the design of an assistance system. Indeed, the contribution of a collaborative robot potentially transforms the nature of the task dedicated to the human and the definition of the specifications of the assistance solution depends on the analysis of the needs and the respective roles envisaged for the human and the robot within the dyad. To fill these methodological gaps, it is necessary, on the basis of case studies, to better define the notion of tasks in the context of human-robot coupling and to establish a typology of this type of interaction taking into account, in as much detail as possible, the different physical and cognitive constraints as well as their potential psychological, organizational or ethical impacts.
The third challenge is related to the need to reflect on the control laws of collaborative robots in terms of human-robot coupling. The efficiency of this coupling requires an ability to predict future human actions. This prediction should make the interaction more intuitive but also aim at an optimal coupling from the point of view of "slow" phenomena such as fatigue. The major challenge is therefore to move from reactive to predictive control laws, by integrating a predictive model of the human in terms of motor skills as well as movement and decision strategies.
Centre(s) inria
In partnership with


Deadline to apply