Equipe-projet
AUCTUS
Des robots au service de l'humain au travail
Des robots au service de l'humain au travail
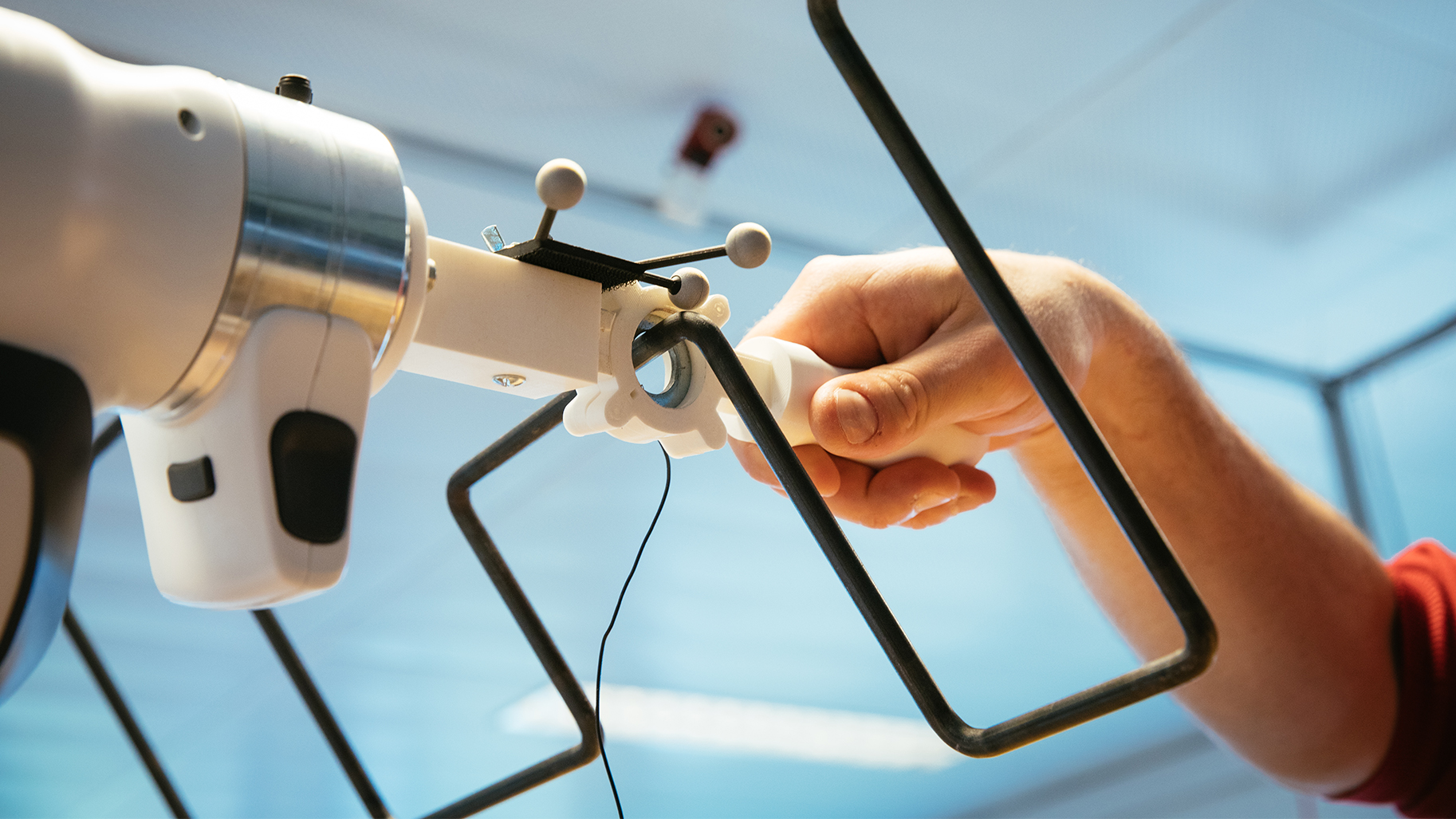
L'objectif de l'équipe Auctus est d’imaginer les robots collaboratifs du futur.
La capacité d'adaptation est une caractéristique de l'être humain, qui le place au centre de l'appareil de production. Cependant, cela ne peut plus se faire au détriment de sa santé et de son bien-être. Comment concilier l'amélioration des compétences manuelles et analytiques d'une personne avec l'augmentation souhaitée de la productivité et de la qualité de fabrication, tout en réduisant la pénibilité du travail ? La robotique collaborative, que nous cherchons à construire, est l'une des solutions pour relever ce défi sociétal. Elle s’inscrit dans l'intégration des technologies numériques dans le processus de production afin de relever le défi de la personnalisation des services et des produits, et dans la promotion de l’agilité humaine pour rendre les lignes de fabrication et de maintenance flexibles et polyvalentes.
Le premier défi consiste à évaluer la difficulté d'une tâche, la sécurité et le bien-être des opérateurs et, plus en amont, leur état cognitif, qui influent sur leurs stratégies sensorimotrices pour exécuter la tâche. La numérisation des usines, par l'installation de capteurs sur place, permet une meilleure observation des machines et des hommes. Les informations disponibles peuvent ainsi permettre de repenser la manière dont l'évaluation des activités est réalisée. Ainsi, nous avons pour ambition d'établir un lien direct entre les aspects moteurs du mouvement et les aspects cognitifs qui dictent les stratégies motrices : la fatigue, l’expérience dans la construction du savoir-faire (manuelle/cognitive), etc. La manière de déterminer les bons critères pour adapter le comportement d'un cobot reste largement inexplorée en robotique.
Le second défi est de définir une méthodologie pour lier l'analyse de la tâche et des mouvements humains qu'elle induit, à la conception d’un système d'assistance. En effet, l'apport d'un robot collaboratif transforme potentiellement la nature de la tâche dédiée à l'humain et la définition des spécifications de la solution d’assistance dépend de l'analyse des besoins et ainsi que des rôles respectifs envisagés pour l’humain et le robot au sein de la dyade. Pour combler ces lacunes méthodologiques, il est nécessaire, sur la base d'études de cas, de mieux définir la notion de tâches dans le contexte du couplage humain-robot et d'établir une typologie de ce type d'interaction en tenant compte, de manière aussi détaillée que possible, des différentes contraintes physiques et cognitives ainsi que de leurs impacts psychologiques, organisationnels ou éthiques potentiels.
Le troisième défi est lié à la nécessité de réfléchir aux lois de commande des robots collaboratifs en termes de couplage humain-robot. L'efficacité de ce couplage requiert une capacité à prédire les actions humaines futures. Cette prédiction doit rendre l'interaction plus intuitive mais aussi viser un couplage optimal du point de vue des phénomènes "lents" tels que la fatigue. Le défi majeur est donc de passer de lois de commande réactives à des lois de commande prédictives, en intégrant un modèle de prédiction de l’humain en termes de capacités motrices ainsi que de stratégies de mouvement et de décision.
Centre(s) inria
En partenariat avec